Back to Projects
Unknown Environment
Unknown Environment
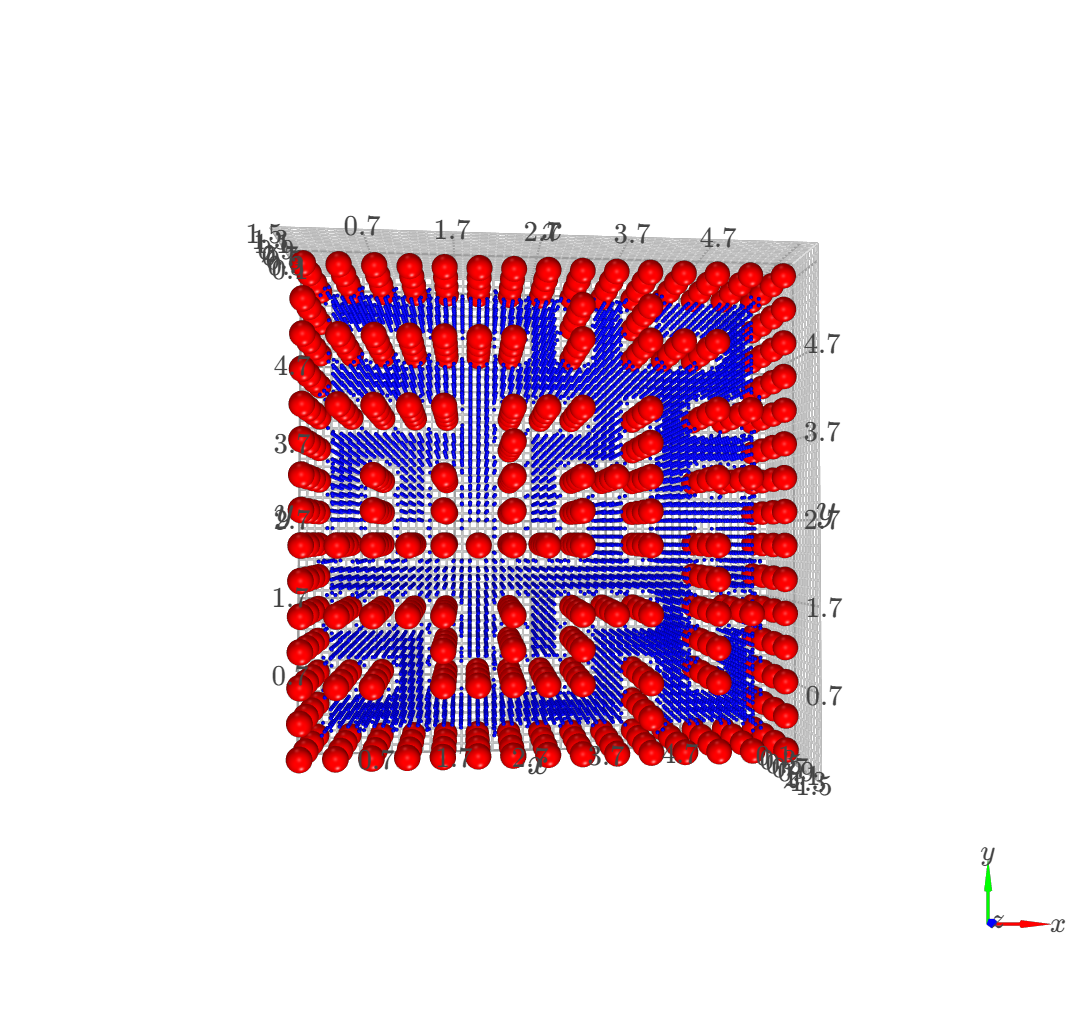
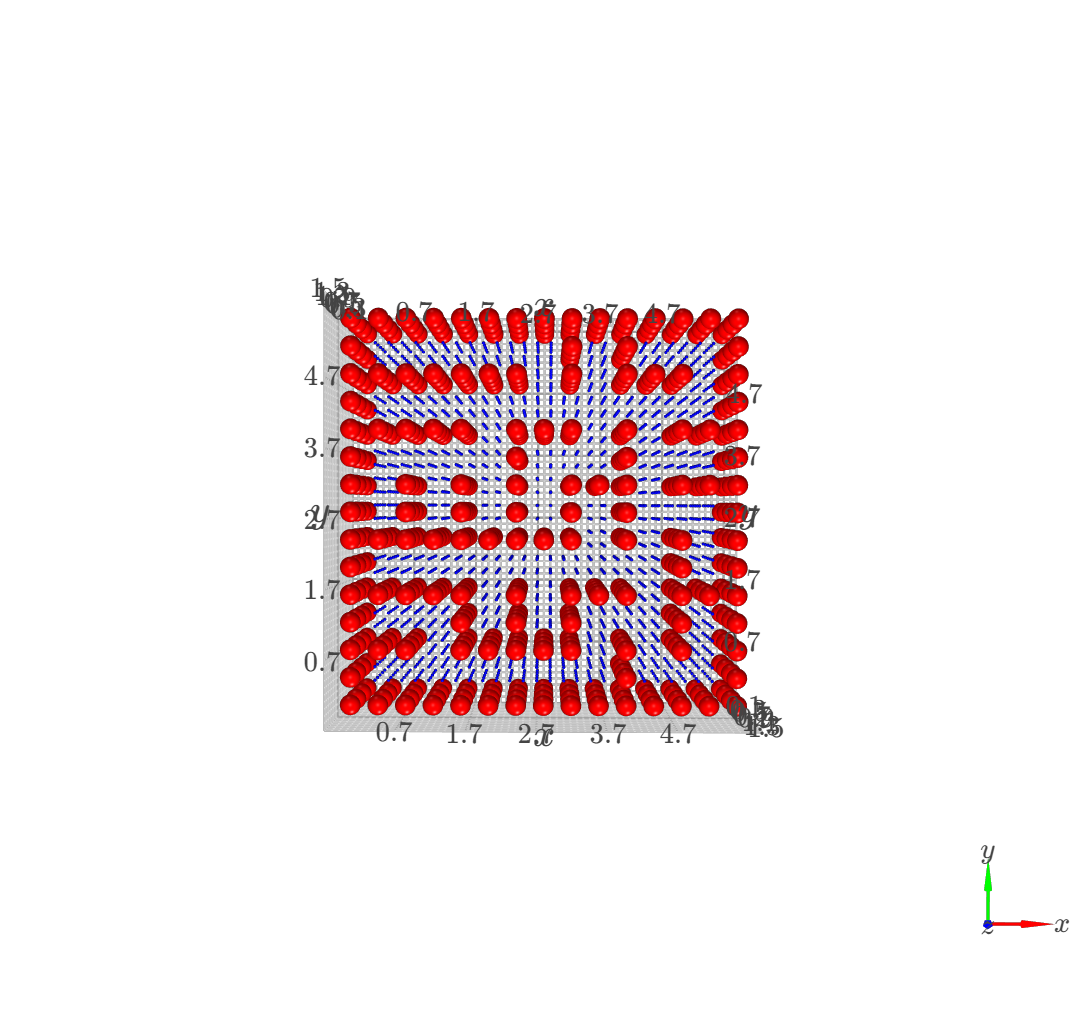
Drone Path Planning
Global planner implementation using Dijkstra algorithm for a quadrotor in PyBullet simulation, ensuring safe maneuverability and collision avoidance.
Python
Dijkstra
PyBullet